===
Index
矩阵模板
template <typename T>
struct Mat {
vector<vector<T>> dat;
Mat() = default;
Mat(int n) : Mat(n, n) {}
Mat(int n, int m, T fill_value = T(0)) : dat(n, vector<T>(m, fill_value)) {}
Mat(const vector<vector<T>>& dat) : dat(dat) {}
const vector<T>& operator[](int i) const { return dat[i]; }
vector<T>& operator[](int i) { return dat[i]; }
operator vector<vector<T>>() const { return dat; }
friend bool operator==(const Mat<T>& A, const Mat<T>& B) { return A.dat == B.dat; }
friend bool operator!=(const Mat<T>& A, const Mat<T>& B) { return A.dat != B.dat; }
pair<int, int> shape() const { return dat.empty() ? make_pair<int, int>(0, 0) : make_pair<int, int>(dat.size(), dat[0].size()); }
int row_size() const { return dat.size(); }
int col_size() const { return dat.empty() ? 0 : dat[0].size(); }
friend Mat<T>& operator+=(Mat<T>& A, const Mat<T>& B) {
assert(A.shape() == B.shape());
auto [n, m] = A.shape();
for (int i = 0; i < n; ++i) for (int j = 0; j < m; ++j) A.dat[i][j] += B.dat[i][j];
return A;
}
friend Mat<T>& operator-=(Mat<T>& A, const Mat<T>& B) {
assert(A.shape() == B.shape());
auto [n, m] = A.shape();
for (int i = 0; i < n; ++i) for (int j = 0; j < m; ++j) A.dat[i][j] -= B.dat[i][j];
return A;
}
friend Mat<T>& operator*=(Mat<T>& A, const Mat<T>& B) { return A = A * B; }
friend Mat<T>& operator*=(Mat<T>& A, const T& val) {
for (auto& row : A.dat) for (auto& elm : row) elm *= val;
return A;
}
friend Mat<T>& operator/=(Mat<T>& A, const T& val) { return A *= T(1) / val; }
friend Mat<T>& operator/=(Mat<T>& A, const Mat<T>& B) { return A *= B.inv(); }
friend Mat<T> operator+(Mat<T> A, const Mat<T>& B) { A += B; return A; }
friend Mat<T> operator-(Mat<T> A, const Mat<T>& B) { A -= B; return A; }
friend Mat<T> operator*(const Mat<T>& A, const Mat<T>& B) {
assert(A.col_size() == B.row_size());
const int n = A.row_size(), m = A.col_size(), l = B.col_size();
if (min({ n, m, l }) <= 70) {
Mat<T> C(n, l);
for (int i = 0; i < n; ++i) for (int j = 0; j < m; ++j) for (int k = 0; k < l; ++k) {
C.dat[i][k] += A.dat[i][j] * B.dat[j][k];
}
return C;
}
// strassen
const int nl = 0, nm = n >> 1, nr = nm + nm;
const int ml = 0, mm = m >> 1, mr = mm + mm;
const int ll = 0, lm = l >> 1, lr = lm + lm;
auto A00 = A.submat(nl, nm, ml, mm), A01 = A.submat(nl, nm, mm, mr);
auto A10 = A.submat(nm, nr, ml, mm), A11 = A.submat(nm, nr, mm, mr);
auto B00 = B.submat(ml, mm, ll, lm), B01 = B.submat(ml, mm, lm, lr);
auto B10 = B.submat(mm, mr, ll, lm), B11 = B.submat(mm, mr, lm, lr);
auto P0 = (A00 + A11) * (B00 + B11), P1 = (A10 + A11) * B00;
auto P2 = A00 * (B01 - B11), P3 = A11 * (B10 - B00);
auto P4 = (A00 + A01) * B11, P5 = (A10 - A00) * (B00 + B01), P6 = (A01 - A11) * (B10 + B11);
Mat<T> C(n, l);
C.assign_submat(nl, ll, P0 + P3 - P4 + P6), C.assign_submat(nl, lm, P2 + P4);
C.assign_submat(nm, ll, P1 + P3), C.assign_submat(nm, lm, P0 + P2 - P1 + P5);
if (l != lr) for (int i = 0; i < nr; ++i) for (int j = 0; j < mr; ++j) C.dat[i][lr] += A.dat[i][j] * B.dat[j][lr];
if (m != mr) for (int i = 0; i < nr; ++i) for (int k = 0; k < l; ++k) C.dat[i][k] += A.dat[i][mr] * B.dat[mr][k];
if (n != nr) for (int j = 0; j < m; ++j) for (int k = 0; k < l; ++k) C.dat[nr][k] += A.dat[nr][j] * B.dat[j][k];
return C;
}
friend Mat<T> operator*(const T& val, Mat<T> A) { A *= val; return A; }
friend Mat<T> operator*(Mat<T> A, const T& val) { A *= val; return A; }
friend Mat<T> operator/(const Mat<T>& A, const Mat<T>& B) { return A * B.inv(); }
friend Mat<T> operator/(Mat<T> A, const T& val) { A /= val; return A; }
friend Mat<T> operator/(const T& val, const Mat<T>& A) { return val * A.inv(); }
friend vector<T> operator*(const Mat<T>& A, const vector<T>& x) {
const auto [n, m] = A.shape();
assert(m == int(x.size()));
vector<T> b(n, T(0));
for (int i = 0; i < n; ++i) for (int j = 0; j < m; ++j) b[i] += A.dat[i][j] * x[j];
return b;
}
static Mat<T> e0(int n) { return Mat<T>(n, Identity::ADD); }
static Mat<T> e1(int n) { return Mat<T>(n, Identity::MUL); }
Mat<T> pow(long long b) const {
assert_square();
assert(b >= 0);
Mat<T> res = e1(row_size()), p = *this;
for (; b; b >>= 1) {
if (b & 1) res *= p;
p *= p;
}
return res;
}
Mat<T> inv() const { return *safe_inv(); }
optional<Mat<T>> safe_inv() const {
assert_square();
Mat<T> A = *this;
const int n = A.row_size();
for (int i = 0; i < n; ++i) {
A[i].resize(2 * n, T{ 0 });
A[i][n + i] = T{ 1 };
}
for (int i = 0; i < n; ++i) {
for (int k = i; k < n; ++k) if (A[k][i] != T{ 0 }) {
swap(A[i], A[k]);
T c = T{ 1 } / A[i][i];
for (int j = i; j < 2 * n; ++j) A[i][j] *= c;
break;
}
if (A[i][i] == T{ 0 }) return nullopt;
for (int k = 0; k < n; ++k) if (k != i and A[k][i] != T{ 0 }) {
T c = A[k][i];
for (int j = i; j < 2 * n; ++j) A[k][j] -= c * A[i][j];
}
}
for (auto& row : A.dat) row.erase(row.begin(), row.begin() + n);
return A;
}
T det() const {
assert_square();
Mat<T> A = *this;
bool sgn = false;
const int n = A.row_size();
for (int j = 0; j < n; ++j) for (int i = j + 1; i < n; ++i) if (A[i][j] != T{ 0 }) {
swap(A[j], A[i]);
T q = A[i][j] / A[j][j];
for (int k = j; k < n; ++k) A[i][k] -= A[j][k] * q;
sgn = not sgn;
}
T res = sgn ? T{ -1 } : T{ +1 };
for (int i = 0; i < n; ++i) res *= A[i][i];
return res;
}
T det_arbitrary_mod() const {
assert_square();
Mat<T> A = *this;
bool sgn = false;
const int n = A.row_size();
for (int j = 0; j < n; ++j) for (int i = j + 1; i < n; ++i) {
for (; A[i][j].val(); sgn = not sgn) {
swap(A[j], A[i]);
T q = A[i][j].val() / A[j][j].val();
for (int k = j; k < n; ++k) A[i][k] -= A[j][k] * q;
}
}
T res = sgn ? -1 : +1;
for (int i = 0; i < n; ++i) res *= A[i][i];
return res;
}
void assert_square() const { assert(row_size() == col_size()); }
Mat<T> submat(int r1, int r2, int c1, int c2) const {
Mat<T> A(r2 - r1, c2 - c1);
for (int i = r1; i < r2; ++i) for (int j = c1; j < c2; ++j) {
A[i - r1][j - c1] = dat[i][j];
}
return A;
}
void assign_submat(int r1, int c1, const Mat<T>& A) {
const int n = A.row_size(), m = A.col_size();
assert(r1 + n <= row_size() and c1 + m <= col_size());
for (int i = 0; i < n; ++i) for (int j = 0; j < m; ++j) {
dat[r1 + i][c1 + j] = A[i][j];
}
}
private:
enum class Identity { ADD, MUL };
Mat(int n, Identity ident) : Mat<T>::Mat(n) {
if (ident == Identity::MUL) for (int i = 0; i < n; ++i) dat[i][i] = 1;
}
};
使用说明
- 声明 Matrix 并赋值
Mat<mint> A(n);
for (int i = 0; i < n; ++i) {
for (int j = 0, val; j < n; ++j) {
std::cin >> val, A[i][j] = val;
}
}
或者
vector<vector<mint>> a { {0, 1}, {1, 0} };
Mat<mint> A(a);
- 矩阵四则运算
维护需要满足四则运算条件
Mat<mint> A(a), B(b);
A += B;
A -= B;
A *= B;
- 矩阵快速幂
求矩阵的k次方
Mat<mint> A(a);
long long k = 1e18;
auto T = A.pow(k);
- 矩阵行列式
Mat<mint> A(a);
int det = A.det().val();
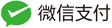
字符串转换
给定长度为n的字符串s和t,每次操作可以将s向右循环移动任意l位(0<l<n),给你一个整数k,求恰好k次操作将s变为t的方案数。模1e9+7
- 2 <= n <= 5e5
- 1 <= k <= 1e15
分析
class Solution {
public:
int numberOfWays(string s, string t, long long k) {
int n = s.size();
auto p = kmp(t, s + s.substr(0, n -1));
int x = p.size(), y = n - x, p1 = x && p[0] == 0, p2 = p1 ^ 1;
Mat<mint> A({ {x - 1, x}, {y, y - 1} });
auto T = A.pow(k);
return (T[0][0] * p1 + T[0][1] * p2).val();
}
};
类斐波那契数列
有一个整数数列 x0,x1,x2,… 该数列的前两项 x0,x1 的值已知,其它项可以通过如下递推式求出:
x[n] = a * x[n - 1] + b * x[n - 2] (n >= 2)
给定一个可能非常大的正整数 N 和正整数 M,求 x[n] 对 M 取模的值。
- 0 < a[0], a[1], p, q <= 1e9
- 1e9 < M <= 2e9
- N 的位数不超过 1e6
分析
通过矩阵快速幂求出第n项。
void ac_yyf(int tt) {
int x0, x1, a, b, m;
cin >> x0 >> x1 >> a >> b;
string n;
cin >> n >> m;
modint::set_mod(m);
Mat<modint> A({ {0, 1}, {b, a} });
Mat<modint> ans = Mat<modint>::e1(2);
for (int i = 0; i < n.size(); ++i) {
ans = ans.pow(10) * A.pow(n[i] - '0');
}
cout << (ans[0][0] * x0 + ans[0][1] * x1).val() << '\n';
}